Energy in one-dimensional systems
Consider a body that is constrained to move in only one dimension, the $x$- direction.
If there's any force $\myv{F}$ acting on this body, we can completely ignore any components except the $x$ component $F_x$. Then, the work done by the force on the body is $$W(x_1 \rightarrow x_2) = \int_{x_1}^{x_2} F_x(x) \,dx$$
For example, this is not an unrealistic way of treating a little rolling cart on a horizontal track, where we can completely ignore the effect of gravity since it only points in the $z$ direction.
A force is conservative if it fulfills the two conditions:
- $F_x$ depends only on position $x$, and
- The work (defined just above) is independent of the path taken between $x_1$ and $x_2$.
It turns out that, in one dimension, any force that obeys (i) will automatically obey (ii) as well.
Energy landscapes-graphing the potential energy
So, for conservative forces we can come up with a potential energy: $$U(x) = -W(x_0 \rightarrow x) = -\int_{x_0}^{x} F_x(x') dx'$$
 Attach
a spring obeying Hooke's law to one end of a little 1-d rolling cart and the
force on the cart is conservative, given by $F_x= - kx$. The potential energy
that we calculate for this setup (if we say that $U(x_0=0)=0$) is:
$$U(x) = \frac{1}{2}kx^2$$
Attach
a spring obeying Hooke's law to one end of a little 1-d rolling cart and the
force on the cart is conservative, given by $F_x= - kx$. The potential energy
that we calculate for this setup (if we say that $U(x_0=0)=0$) is:
$$U(x) = \frac{1}{2}kx^2$$
which is graphed here:
Taking the derivative of the work expression for $U$, we see that the force: $F_x = -\frac{dU}{dx}$
is related to the slope of this graph.
A potential equilibrium point exists at places where $F_x=0=-\del U/\del x$, that is, the slope of $U(x)$ is 0 (at the origin).
Convince yourself that,
- to the left of the origin, $F_x$ is positive, indicating that the cart is being pushed towards the origin.
- to the right of the origin, $F_x$ is negative, indicating that the cart is being pushed towards the origin.
So the origin is a stable equilibrium position.
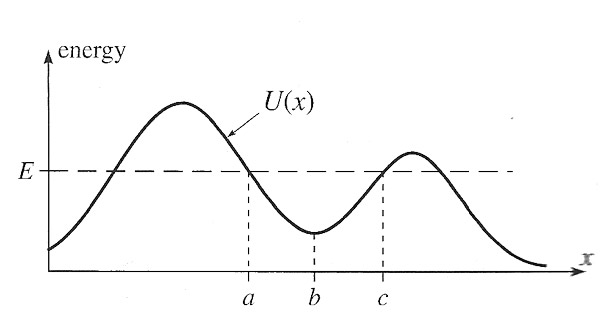
And we can infer many other things about the motion by thinking of this diagram of the potential energy as a landscape with a marble rolling around in it, indicating the $x$-coordinate of the system at any time. For example...
- direction and relative magnitude of the force,
- turning points given a total mechanical energy $E=T+U$,
- whether equilibrium points ($F_x = 0$) are stable or unstable, global (ground state) or metastable.
Here is the simplified energy landscape of the two-atom molecule HCl as a function of the distance relative distance, $r$, between $H^+$ and $Cl^-$.

Systems of 1 generalized coordinate
There are many other physical systems which have a more abstract "position" which depends on only one variable, even though not necessarily along a straight line. Can we also define a potential energy for such systems?

For the roller coaster, we can pin down where the car is by specifying one scalar $s$, the distance along the (potentially very complicated) track from the start of the ride.
Because of the constraint of the track, $\dot{s}$ is always the speed in the direction of motion and so the kinetic energy is $$T = \frac{1}{2}m \dot{s^2}$$
If care has been taken to reduce friction, the forces exerted by the track on the car are normal to the direction of the motion, and so have no effect on the kinetic energy. And so we only need to worry about the component in the direction of motion of external forces such as gravity, which we know to be conservative. $$F_{\text{tangential}} = m \ddot{s}^2$$
If we can come up with an expression for such a force that depends only on the position parameter $s$, then it formally conforms to our requirements for a conservative force, and we can define a potential energy as in a literally 1-d system.
Example 4.34
 A pendulum consisting of a point mass $m$ attached to a massless rod of
length $l$ is fixed to the wall so that it can swing in a vertical plane.
The ball can even be directly above the pivot point.
A pendulum consisting of a point mass $m$ attached to a massless rod of
length $l$ is fixed to the wall so that it can swing in a vertical plane.
The ball can even be directly above the pivot point.
- Write an expression for the pendulum's potential energy $U(\phi)$,
$$\nonumber U(\phi)=mg(L-L\cos\phi)$$ For later, we'll calculate $\dot U$: $$\nonumber \dot U=-mgL(-\sin \phi)\dot \phi=\dot\phi mgL\sin\phi.$$ using the chain rule: $\frac{d}{dt}f(\phi(t))=\frac{d}{d\phi}f(\phi)\cdot \frac{d}{dt}\phi(t)$.
- Write an expression for the pendulum's kinetic energy $T(\dot\phi)$,
$$\nonumber T(\phi)=\frac 12 mv^2 =\frac 12 m (L\dot{\phi})^2=\frac 12mL^2 (\dot{\phi})^2$$ and $$\dot T = \frac 12 mL^2 2(\dot \phi)\ddot \phi=\dot\phi mL^2\ddot \phi.$$
- Now, you can add these together to get $E(\phi,
\dot{\phi})$. Calculate
$\frac{dE}{dt}$
We know that $E$ is constant if there are no conservative forces around, that is to say... $$\frac{dE}{dt}=0.$$ Carry out the derivative, then solve for $\ddot\phi(t)$.
$$\begineq\frac{dE}{dt}=0=&\dot T+\dot U\\ 0=&\dot\phi mL^2\ddot \phi + \dot\phi mgL\sin\phi\\ 0=&L\ddot \phi + g\sin\phi\ \ \ \ \text{(divide by }mL\dot \phi\text{)} \endeq$$ Solving for $\ddot \phi$, $$\ddot \phi = -\frac gL\sin\phi.$$ This is the same equation as the "skateboard on a half-pipe" differential equation! (The *exact* one). It's worth noting:- In chapter 1 we went to a lot of trouble to show that in polar coordinates the acceleration is $a=(\ddot{r} -r \dot{\phi}^2) \uv{r} + (2\dot{r} \dot{\phi} + r\ddot{\phi}) \uv{\phi}$, and then simplified that expression for the special case that $r(t)=$constant.
- Here, the approach of expressing both PE and KE as function of $\phi$ and $\dot{\phi}$ led to the same diff. eq. even though changes in $\phi$ alone is not straight-line motion.
This is the equation of motion for the system-- A differential equation that connects acceleration, (velocity) and position.
Formal solution of motion
Our goal, in Analytical Mechanics, is often to find the position as a function of time.
With conservative forces, there's a recipe we can use to find the motion of any system, at least numerically: Since the mechanical energy $E=T+U(x)$ is conserved, we can rearrange for the kinetic energy $T=\frac{m}{2}\dot{x^2} = E-U(x)$ and solve for the speed... $$\dot{x} = \pm\sqrt{\frac{2}{m}\left[ E-U(x)\right]}$$
Where the speed $\dot{x}$ is a function of $x$, which is in turn a function of $t$. Now... $$\dot{x} = \frac{dx}{dt} \Rightarrow dt = \frac{dx}{\dot{x}}$$
And now we can integrate to get (choosing the positive square root option above, but just for example) $$\begineq \int_0^t dt'=& \int_{x_0}^{x(t)} \frac{dx'}{\dot{x}(x')}\\ t =& \sqrt{\frac{m}{2}} \int_{x_0}^{x(t)} \frac{dx'}{\sqrt{E-U(x')}} \endeq$$
If you can carry out the integral, you might be able to solve the resulting equation for $x(t)$.